机器人自动化集成项目机械设计实战指南

机器人自动化集成项目的机械设计部分是实现高效、精准自动化的重要环节。以下是在真实项目中开展机械设计的详细步骤:
1. 需求分析与方案设计
明确项目需求,包括负载能力、工作范围、精度要求以及生产节拍等关键指标。结合应用场景(如焊接、装配或搬运),确定机器人选型,并设计整体布局方案。例如,针对汽车生产线,可能需要多机器人协同作业的布局,确保各单元互不干扰。
2. 机械结构设计与仿真
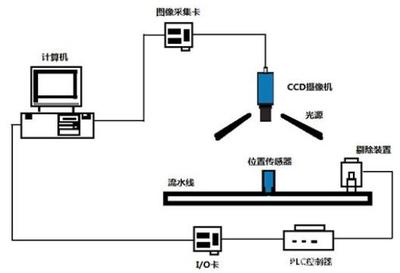
在方案基础上,进行详细结构设计,包括机器人底座、末端执行器(如夹具或工具)、传送系统和安全防护装置。使用CAD软件(如SolidWorks或CATIA)建模,并进行有限元分析(FEA)验证结构强度。同时,通过运动仿真检查机器人可达性和避免碰撞。例如,设计一个搬运机器人时,需确保夹具能稳定抓取工件,且运动轨迹平滑。
3. 组件选型与集成
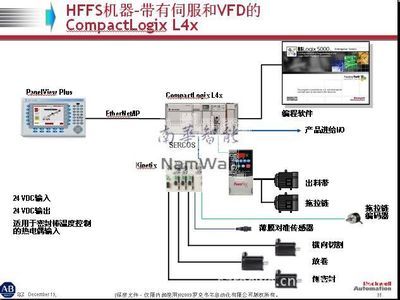
选择标准件(如导轨、气缸和传感器)和定制件,确保兼容性和可靠性。例如,在装配项目中,可能选用高精度直线模组,并与机器人的控制系统集成。注意选型需考虑成本、维护性和环境因素(如防尘或耐高温)。
4. 安装与调试
安装时,先固定机器人底座和周边设备,确保水平度和刚度。然后连接机械部件与电气系统,并进行初步调试。通过试运行检查机械运动是否顺畅,调整参数以优化性能。例如,在安装焊接机器人时,需校准焊枪位置,并测试轨迹精度。
5. 测试与优化
进行负载测试和长期运行测试,识别潜在问题(如振动或磨损)。收集数据后,优化设计以提高效率和寿命。例如,发现传送带抖动后,可加强支撑结构或更换更稳定的驱动组件。
通过以上步骤,机械设计不仅满足功能需求,还能提升项目整体稳定性。实际项目中,团队协作和文档记录也至关重要,以确保设计可复现和维护。不断迭代和验证是成功的关键。
如若转载,请注明出处:http://www.aiaoaiao.com/product/11.html
更新时间:2025-11-29 03:10:56